Detour: Dynamic Programming
- Dynamic Programming
- A general algorithm design technique for solving problems defined by or formulated as recurrences with overlapping sub-instances
- In this context, Programming == Planning
- Main storyline
- Setting up a recurrence
- Relating a solution of a larger instance to solutions of some smaller instances
- Solve small instances once
- Record solutions in a table
- Extract a solution of a larger instance from the table
Forward Probability Calculation
- Need to know $\alpha_t^k$
- Time X States
- When we know $\alpha_t^k$ with X, then we know the value of $P(X)$
- Answering the evalutation question without Z
- ForwardAlgorithm
- Initialize
- $\alpha_t^k = b_{k, x_t} \sum_i \alpha_{t-1}^ia_{i,k}$
- Return $\sum_i \alpha_T^i$
- Initialize
- Proof of correctness
- $\sum_i \alpha_T^i = \sum_i P(x_1, \cdots , x_T, Z_T^i =1)=P(x_1, \cdots ,x_t)$
- Where to use the memorization table?
- $\alpha_t^k$
- Limitation of the forward probability
- Only takes the input sequence of X befor time t
- $P(x_1, \cdots , x_t, Z_t^k = 1) = \alpha_t^K and t \neq T$
- Need to see a probability distribution of a latent variable at time t given the whole X
- Recall the bayes ball algorithm
Backward Probability Calculation
- 이를 계산하면 dynamic programming을 활용 가능함
- Forward 와 Backword를 활용하면 Decoding 문제를 해결가능함
Viterbi Decoding
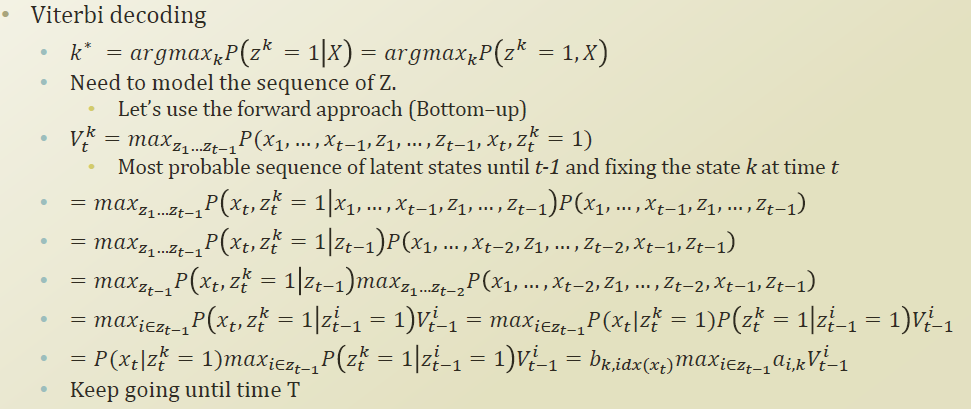
- Need to know $V_t^k$
- Time X States
- Store $V_t^k$ Two variables to store the trace and the probability up to time $t$: Two memorization tables
- Answering the decoding question with $\pi, a, b, X$
- ViterbiDecodingAlgorithm
- Initialize
- $V_1^k = b_{k, x_1}, \pi _k$
- Iterate until time T
- $V_t^k = b_{k, idx(x_t)} max_{i \in Z_{t-1}} a_{i, k}V_{t-1}^i$
- $trace_t^k = argmax_i\in Z_{t-1} a_{i,k}V_{t-1}^i$
- Return $P(X, Z^*) = max_kV_T^k, Z_T^* = argmax_kV_T^k,Z_{t-1}^* = trace_t^{Z_t^*}$
- Technical difficulites in the implemtation
- Very frequent underflow problems
- Turn this into the log domain -> from multiplication to summation
- (지속적으로 확률의 곱셈이 이어지므로 너무 많은 소수점들의 곱셈 연산이 이어짐 -> log변환 후 연산)
'기계학습 > 인공지능및기계학습개론정리' 카테고리의 다른 글
| Sampling Based Inference (Markov Chain) -작성 중 (0) | 2020.12.23 |
|---|---|
| Sampling Based Inference(Forward/Rejection/Importance Sampling) (0) | 2020.11.26 |
| Hidden Markov Model(1: Joint, Marginal Probability of HMM) (0) | 2020.11.16 |
| Bayesian Network (0) | 2020.11.03 |
| Naive Bayes Classifier + Logistic Regression (parameter approximation) (0) | 2020.08.27 |